Shop
Showing 1–12 of 29 results
-

GUS CASE
$40.00 Add to cart -
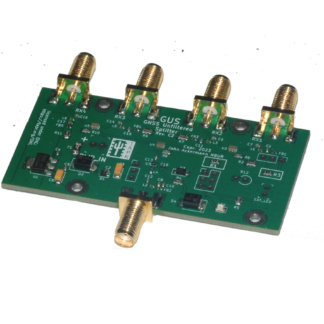
GUS GNSS Antenna Splitter
$85.00 Add to cart -
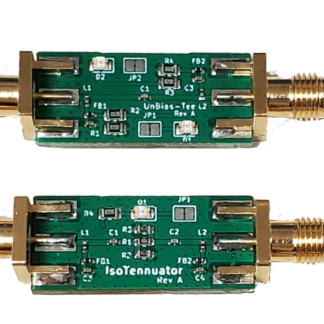
IsoTennuator and UnBias-Tee — Accessories for GUS
$35.00 Add to cart -

Magnetometer ‘Mag Pi’ full kit NO sensor
Sale! Original price was: $60.00.$30.00Current price is: $30.00. Add to cart -
Magnetometer ‘Mag Pi’ full kit with sensor
$80.00 Add to cart -
Magnetometer ‘Mag Pi’ remote-only kit NO sensor
Sale! Original price was: $30.00.$25.00Current price is: $25.00. Add to cart -

new TADD Case And End Plates
Price range: $5.00 through $50.00 View products -

new TADD universal case v1
$50.00 Add to cart -

Pi Eliminator for the MagPi Magnetometer
$45.00 Add to cart -
TADD Case Type-Specific End Plates
$5.00 Select options This product has multiple variants. The options may be chosen on the product page -

TAPR Donation
$10.00 Add to cart -
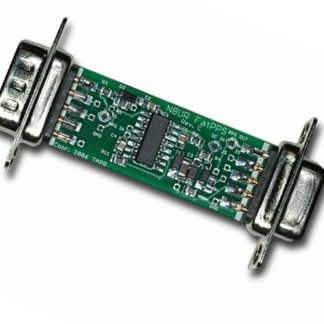
FatPPS Pulse-Stretcher Kit
$54.00 Add to cart
Showing 1–12 of 29 results